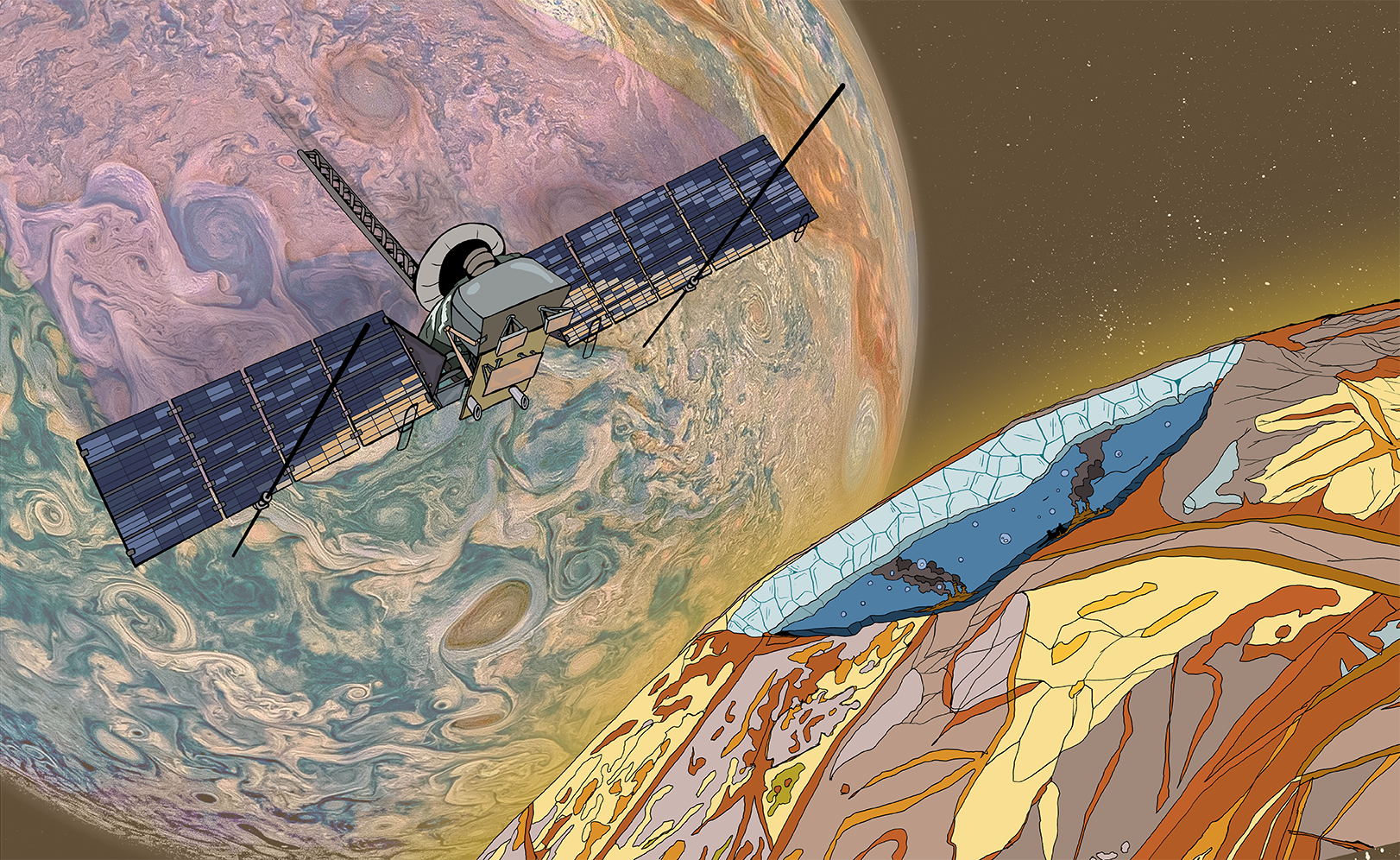
To investigate the subsurface of Europa without landing, we utilize Ground Penetrating Radar (GPR) systems mounted on orbital platforms. Radar sounding works by emitting high-frequency electromagnetic pulses toward the surface. As these waves travel through the ice shell, they reflect off boundaries where dielectric properties change—such as the transition from pure water-ice to brine pockets or the ice-ocean interface. By measuring the "time-of-flight" and the strength of these returning echoes, we can reconstruct a detailed cross-sectional map of the crust’s thickness and internal structure.
Radar sounding is not a panacea; it is governed by the laws of signal attenuation. As radar waves propagate through the icy crust, they lose energy due to absorption and scattering. The primary limiting factor is the purity of the ice. Impurities—such as salts (sulfates/chlorides) and trapped minerals—increase the "loss tangent" of the medium, essentially turning the ice into a semi-conductive material that dissipates radar energy rapidly. High-temperature ice (near the melting point) also increases attenuation. Therefore, predicting whether we can "see" the ocean depends heavily on our temperature and compositional models of the crust.
Radar sounding resolution is not just determined by the radar's power; it is constrained by orbital geometry. As the spacecraft orbits Europa, it performs "Synthetic Aperture" processing. By combining multiple radar returns from different points along the flight path, the system effectively creates a much larger virtual antenna. The resolution is highly dependent on the "nadir" angle (looking straight down) and the spacecraft's velocity. Any wobble in the orbit or misalignment of the antenna phase-center can introduce "clutter"—unwanted reflections from surface features (like cracks or ridges) that mask the faint echoes returning from the deep ocean interface.
Raw radar data is highly unintuitive; it consists of complex, time-varying signals masked by significant noise and surface interference. To extract meaningful information, we apply a series of sophisticated signal processing algorithms. This starts with "Pulse Compression," which increases the signal's range resolution, followed by "Migration Algorithms" (such as Kirchhoff migration) that correctly reposition signal returns in the spatial domain to account for the radar's motion. Finally, we must apply "clutter rejection" filters to strip away surface reflections, leaving only the faint, coherent echoes reflecting from the deeper ice-ocean interface.
Interpreting processed radar data requires distinguishing between different types of subsurface reflectors. A strong, continuous reflection often indicates a clear boundary, such as a localized brine pocket, a slushy layer (a mix of ice and water), or the definitive ice-ocean interface. By analyzing the "dielectric contrast"—the difference in how electromagnetic waves propagate through different materials—we can characterize these interfaces. For example, a sudden shift in the propagation velocity of the radar pulse signifies a move from solid ice into a more conductive, liquid-rich region, allowing us to map the potential habitability of specific crustal zones.
Radar sounding data is rarely interpreted in isolation. To confirm the viability of a landing site, we must synthesize radar profiles with gravimetric data, thermal maps, and geological surface observations. By integrating these datasets, we can build a three-dimensional model of the crustal stability. This allows us to identify "sweet spots"—regions where the ice is thin, geologically active (facilitating subsurface exchange), and free of excessive surface clutter—providing the highest probability of success for future lander deployment and sub-ice penetration missions.
To move beyond simple depth-profiling, we employ Radar Tomography and Interferometry. Radar Interferometry involves comparing phase differences between multiple orbital passes over the same location; this allows us to map microscopic surface changes and detect subtle subsurface topography. Radar Tomography, by contrast, utilizes data from multiple viewing angles to reconstruct a true three-dimensional volume of the ice crust. This reveals the geometry of hidden chaos terrain blocks and the orientation of brine-filled fractures, providing a structural map that is essential for mission safety and scientific target identification.
Radar sounding is inherently constrained by the physics of wave propagation: low frequencies penetrate deeper but yield lower resolution, while high frequencies provide sharper images at the cost of shallower penetration. To overcome this, we employ Multi-Frequency Analysis. By integrating data from a low-frequency band (e.g., HF/VHF for deep crustal penetration) and a high-frequency band (e.g., UHF for surface and near-surface structural detail), we can build a comprehensive "frequency-stacked" model of the ice shell. This enables the separation of surface clutter from true, deep-seated subsurface signals.
The next frontier in radar sounding involves missions like the Europa Clipper, which carries the REASON (Radar for Europa Assessment and Sounding: Ocean to Near-surface) instrument. Unlike previous probes, REASON is a dual-frequency, dual-channel ice-penetrating radar. It is designed specifically to operate in the high-radiation environment of Jupiter, employing sophisticated digital beamforming to mitigate surface clutter. By collecting high-resolution cross-sections across various regions of Europa, these missions will finalize our understanding of the ice shell's thickness, internal structure, and the presence of accessible "melt pockets" for potential future surface-lander missions.